1-13 笔记
本文共 294 字,大约阅读时间需要 1 分钟。
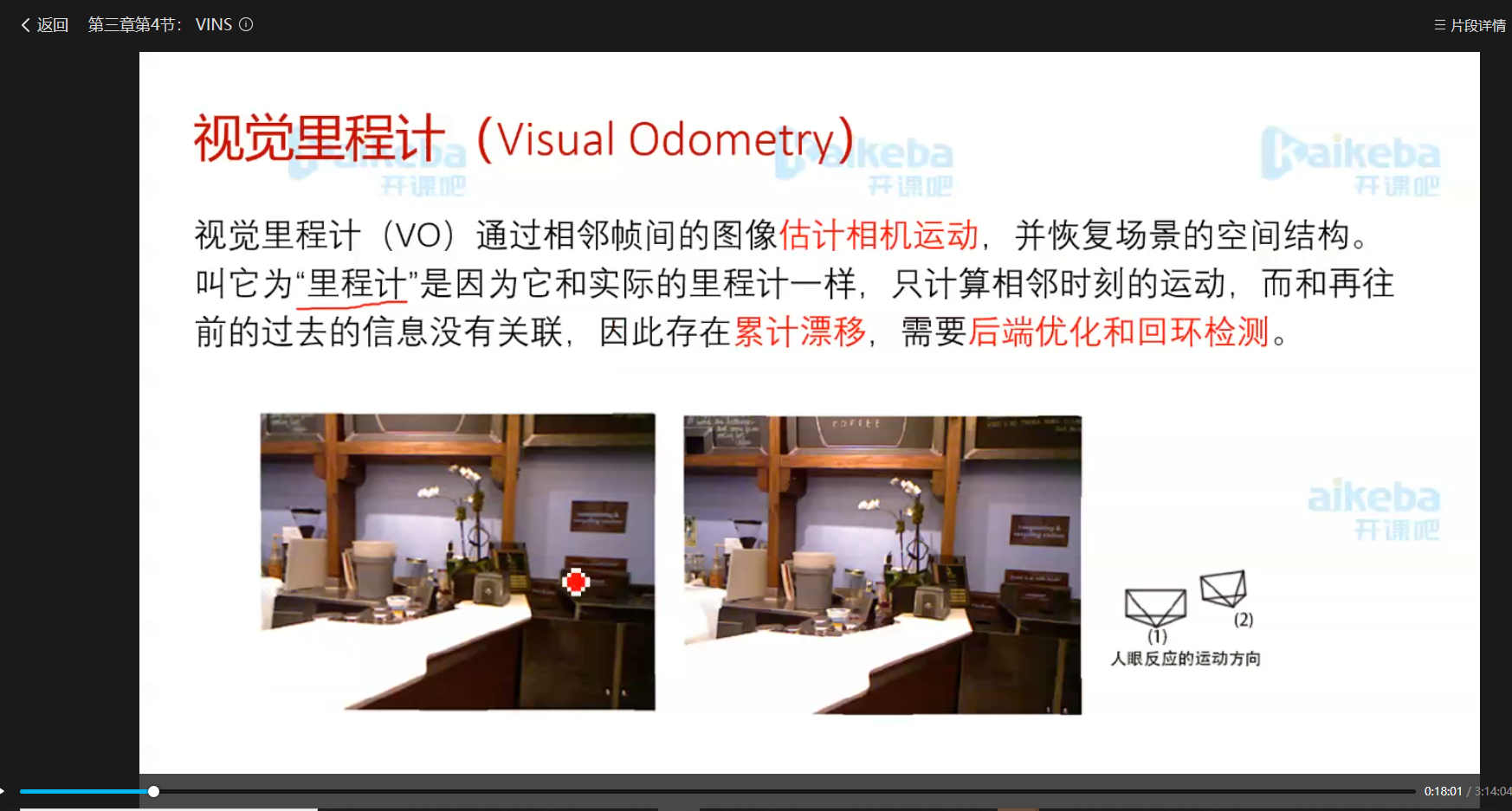
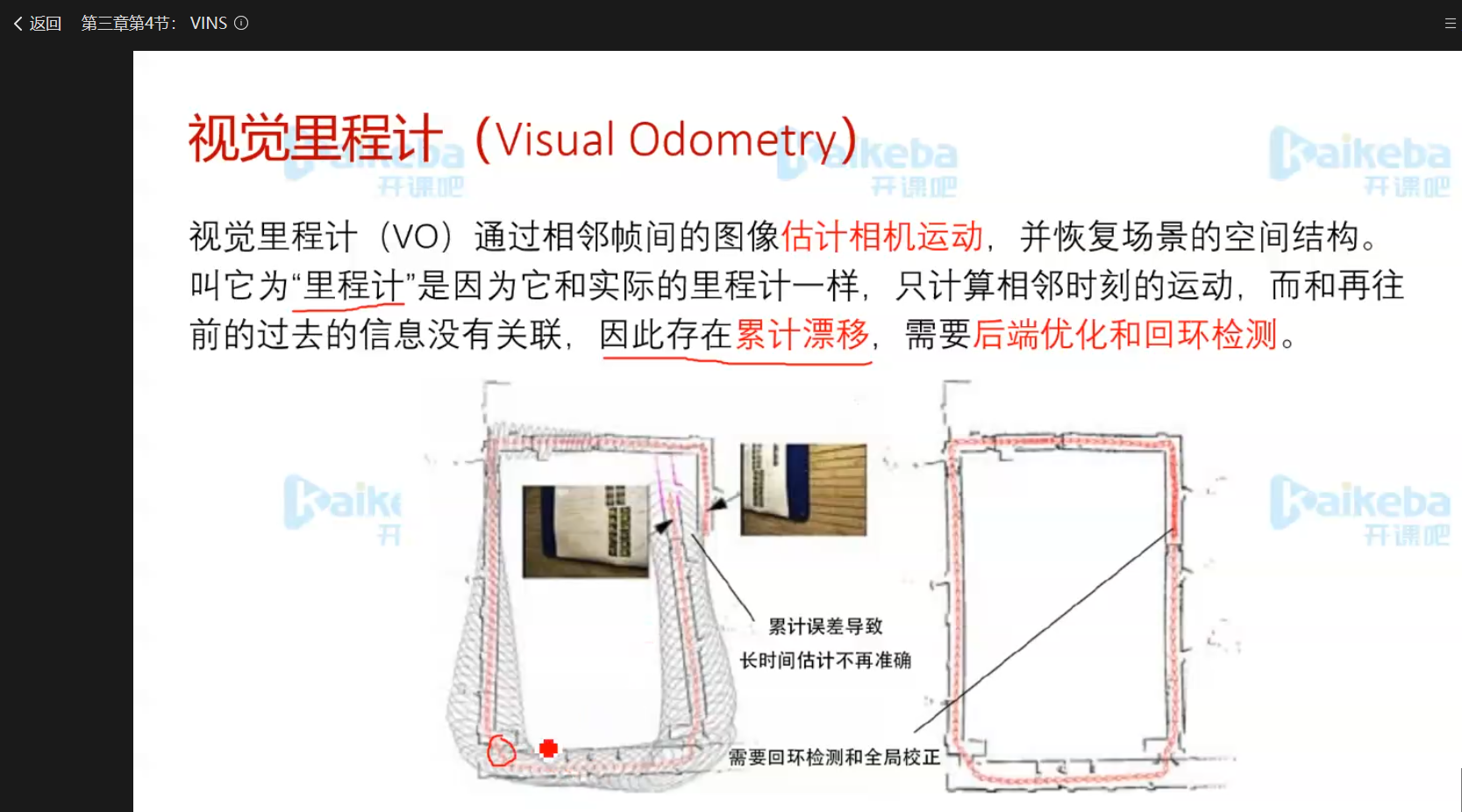
只和相邻的相关。
前面有一点误差后面会永远保存下来。
任何的状态估计,一定有误差,一定会有误差对应的数学模型,然后根据这个误差数学模型去求个最优化问题,去让这个误差尽可能小。


大疆用的紧耦合。


初始化完成之前,VINS是不会给你发任何定位信息的。初始化时间要多久不一定。
听了他这讲的,知道了摄像头为什么需要标定。之前一直不知道,也没去弄清楚。

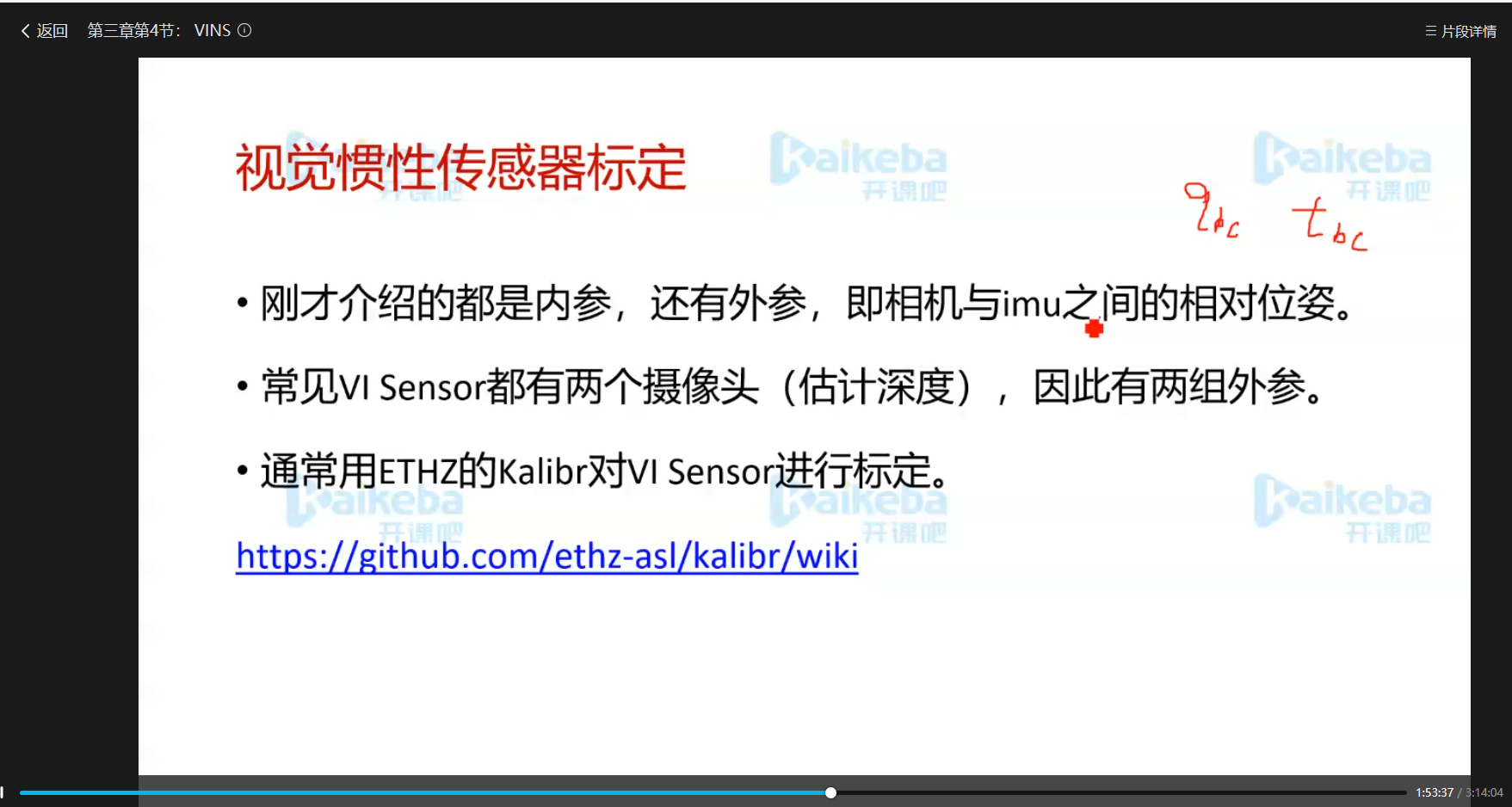
现在单靠双目相机做深度估计还是不太可靠。但有的时候也可以。
VINS MONO是单目,需要先晃来晃去做初始化,VINS FUSION是双目,双目不需要晃来晃去做初始化,可以直接起飞
但是他实际觉得实际飞VIO还是 VINS MONO可靠性高。
转载地址:http://dhoni.baihongyu.com/
你可能感兴趣的文章
cell上label的背景颜色在选中状态下改变的解决办法
查看>>
GPS定位
查看>>
地图、显示用户位置、大头针
查看>>
自定义大头针
查看>>
UIButton添加block点击事件
查看>>
利用runtime给类别添加属性
查看>>
本地推送
查看>>
FMDB的使用
查看>>
UIImage存为本地文件与UIImage转换为NSData
查看>>
[转]打印质数的各种算法
查看>>
[转]javascript with延伸的作用域是只读的吗?
查看>>
php的autoload与global
查看>>
IE不支持option的display:none属性
查看>>
[分享]mysql内置用于字符串型ip地址和整数型ip地址转换函数
查看>>
TableDnd(JQuery表格拖拽控件)应用进阶
查看>>
[转]开源中最好的Web开发的资源
查看>>
java接口不能实例化原因浅谈
查看>>
Https加密及攻防
查看>>
Java生成随机不重复推广码邀请码
查看>>
Java8 Lambda表达式介绍
查看>>